![David Molnar [Update:, PhD]](https://www.srcf.ucam.org/~dm516/wp-content/themes/twentyeleven/images/headers/chessboard.jpg)
I believe many lab robots are scrapped purely because the control computer and the control software become obsolete. With the ability to write new software such robots can become useful again, and not only in DIY-bio settings. There is however very little documentation as far as I can see. I had opportunity to experiment for a weekend with an Ettan Spot Picker lab robot, and found that reverse engineering its communication protocol was not very hard. Unfortunately most of my documentation in text files and programs were eventually lost together with the old command computer of the robot, as I forgot to move them off. I hope what is left can be still of some help in starting, if someone is in a similar situation.

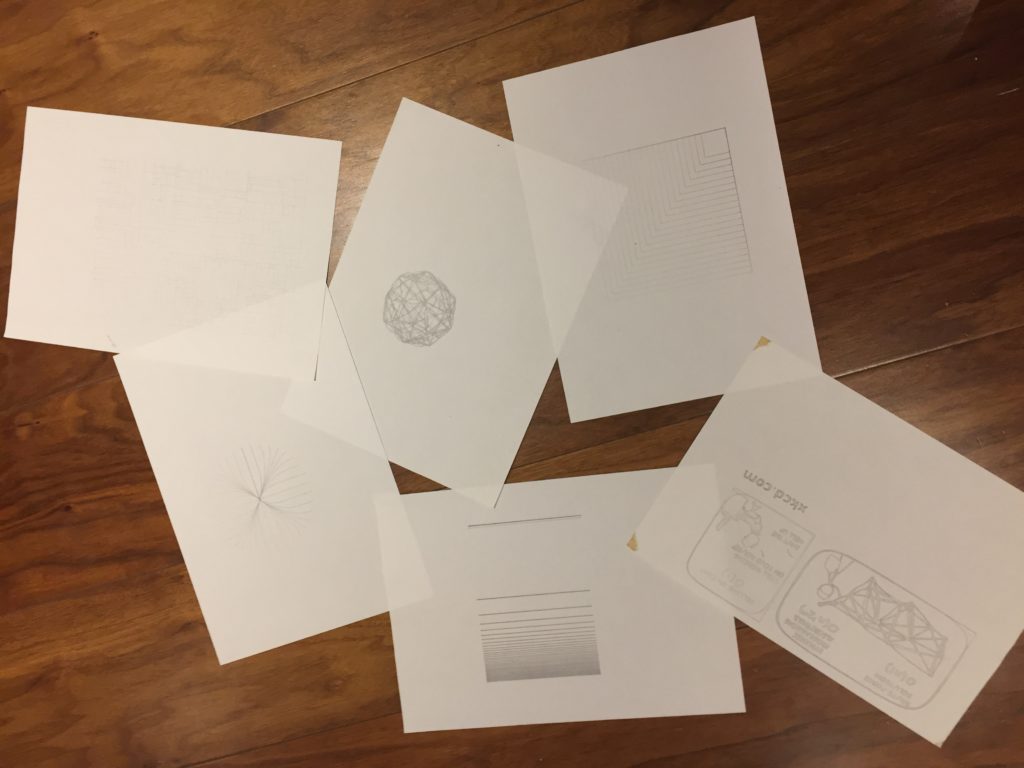
An Ettan Spot Picker (Wikimedia Commons).